
기억보다 기록을
Next Generation Reservoir Computing 코드 실습 (MATLAB) 본문
오늘은 MATLAB으로 Next Generation Reservoir Computing (NG-RC)를 구현해보려고 한다.
코드의 전체적인 구성은 다음과 같다.
- Lorenz attractor 데이터셋 생성
- Feature vector 구성
- Ridge regression을 통해 가중치 계산
- 시계열 예측
이번 실습에서는 Fig 2의 결과를 재현해보고자 한다.
즉, \( x,\,y,\,z \) 를 모두 넣어서 전체 시스템을 forecasting하는 것을 목표로 한다.
1. Lorenz attractor 데이터셋 생성 코드
clear; clc; close all;
%% 1. 데이터 생성 (Ground Truth: Lorenz System)
sigma = 10; rho = 28; beta = 8/3;
lorenz = @(t,s) [sigma*(s(2)-s(1)); s(1)*(rho-s(3))-s(2); s(1)*s(2)-beta*s(3)];
dt = 0.025;
[t, raw_data] = ode45(lorenz, 0:dt:100, [1; 1; 1]);
% 데이터 전처리 (Z-score Normalization)
data = zscore(raw_data)'; % (Dimension x Time) 형태로 전치: 3 x N
[dim, total_len] = size(data);
% train/test 데이터 분할
train_len = 2000;
test_len = length(data(1,:))-train_len;
train_data = data(:, 1:train_len);
test_data = data(:, train_len+1:train_len+test_len);

NG-RC 원 논문을 보면 \( k \)와 \( s \) 두개의 parameter가 등장하는데, 각각 delay 길이와 stride를 의미한다.
%% 2. Feature vector 구성
% parameter setting
k = 2; % Delay taps (현재와 바로 전 과거 1개만 봄)
s = 1; % Stride
alpha = 1e-4; % Ridge regression parameter (Tikhonov)
bias = 1.0; % bias term
% Warm-up: k*s 만큼의 과거 데이터가 있어야 feature vector를 만들 수 있음
warmup = k*s;버리는 데이터 길이인 warmup은 논문에서처럼 \( sk \) 로 설정했다.
%% 2. Feature vector 구성
O_train = [];
Y_target = []; % 다음 스텝 예측 목표 (X_t+1)
for i = warmup : train_len - 1
% --- [Step A] Linear Part (Eq. 5) ---
% 현재(t)와 과거(t-k)의 상태 벡터를 가져와서 일렬로 펼칩니다.
% 현재로부터 k개를 가져오는 것이기 때문에 for loop의 인덱스는 0부터 시작
vec_linear = [];
for delay = 0:(k-1)
vec_linear = [vec_linear; train_data(:, i - delay*s)];
end
% --- [Step B] Nonlinear Part (Eq. 6) ---
% linear vector끼리의 outer product
full_prod = vec_linear * vec_linear'; % Outer Product
% upper triangle 추출
idx = triu(true(size(full_prod)));
vec_nonlinear = full_prod(idx);
% Total Feature Vector ---
% Bias + Linear + Nonlinear
O_vec = [bias; vec_linear; vec_nonlinear];
O_train = [O_train, O_vec]; % 입력 데이터 행렬
Y_target = [Y_target, train_data(:, i+1)]; % 정답(타겟): 바로 다음 스텝
end
Step A에서는 논문의 5번 수식을 구현하였다.

Step B에서는 논문의 6번 수식을 구현( \( p=2\) 로 설정) & 모든 term을 합쳐주었다.

우리의 경우 \( k=2 \) 이고 \( d=3 \)이기 때문에 total feature vector가 1+6+21 = 28 차원이 나온다.

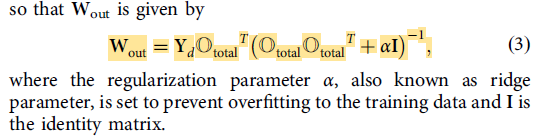
%% 3. Ridge regression을 통해 가중치 행렬 (W_out) 계산
feat_dim = size(O_train, 1);
W_out = (Y_target * O_train') * inv(O_train * O_train' + alpha * eye(feat_dim));
% Lorenz attractor prediction
Y_pred = zeros(dim, test_len);
% train data의 마지막 부분(초기값)을 가져옵니다.
current_history = train_data(:, train_len - warmup : train_len);
for t = 1:test_len
% 1. 현재 history buffer로 feature vector 생성
vec_linear = [];
for delay = 0:(k-1)
% history의 끝에서부터 과거로 가져옴
vec_linear = [vec_linear; current_history(:, end - delay*s)];
end
full_prod = vec_linear * vec_linear';
vec_nonlinear = full_prod(triu(true(size(full_prod))));
O_vec = [1; vec_linear; vec_nonlinear];
% 2. 다음 스텝 예측 (행렬 곱)
next_step = W_out * O_vec;
Y_pred(:, t) = next_step;
% 3. History 업데이트
% 가장 오래된 데이터 버리고, 방금 예측한 값을 끝에 추가 (Closed-loop)
current_history = [current_history(:, 2:end), next_step];
end
실제 값과 예측값 비교
%% 시각화
figure('Position', [100, 100, 1000, 500]);
plot(test_data(1, :), 'k', 'LineWidth', 1.5); hold on;
plot(Y_pred(1, :), 'r--', 'LineWidth', 1.5);
title('Time Series Prediction (x-component)');
legend('Ground Truth', 'NG-RC Prediction');
xlabel('Time Steps'); ylabel('x'); grid on;
논문의 그림과 비슷하게, 특정 Lyapunov time까지는 아주 잘 맞추는 것을 볼 수 있다.
<전체 코드>
clear; clc; close all;
%% 1. 데이터 생성 (Ground Truth: Lorenz System)
sigma = 10; rho = 28; beta = 8/3;
lorenz = @(t,s) [sigma*(s(2)-s(1)); s(1)*(rho-s(3))-s(2); s(1)*s(2)-beta*s(3)];
dt = 0.025;
[t, raw_data] = ode45(lorenz, 0:dt:100, [1; 1; 1]);
% 데이터 전처리 (Z-score Normalization)
data = zscore(raw_data)'; % (Dimension x Time) 형태로 전치: 3 x N
[dim, total_len] = size(data);
% train/test 데이터 분할
train_len = 2000;
test_len = length(data(1,:))-train_len;
train_data = data(:, 1:train_len);
test_data = data(:, train_len+1:train_len+test_len);
%% 2. Feature vector 구성
% parameter setting
k = 2; % Delay taps (현재와 바로 전 과거 1개만 봄)
s = 1; % Stride
alpha = 1e-4; % Ridge regression parameter (Tikhonov)
bias = 1.0; % bias term
% Warm-up: k*s 만큼의 과거 데이터가 있어야 feature vector를 만들 수 있음
warmup = k*s;
O_train = [];
Y_target = []; % 다음 스텝 예측 목표 (X_t+1)
for i = warmup : train_len - 1
% --- [Step A] Linear Part (Eq. 5) ---
% 현재(t)와 과거(t-k)의 상태 벡터를 가져와서 일렬로 펼칩니다.
% 현재로부터 k개를 가져오는 것이기 때문에 for loop의 인덱스는 0부터 시작
vec_linear = [];
for delay = 0:(k-1)
vec_linear = [vec_linear; train_data(:, i - delay*s)];
end
% --- [Step B] Nonlinear Part (Eq. 6) ---
% linear vector끼리의 outer product
full_prod = vec_linear * vec_linear'; % Outer Product
% upper triangle 추출
idx = triu(true(size(full_prod)));
vec_nonlinear = full_prod(idx);
% Total Feature Vector ---
% Bias + Linear + Nonlinear
O_vec = [bias; vec_linear; vec_nonlinear];
O_train = [O_train, O_vec]; % 입력 데이터 행렬
Y_target = [Y_target, train_data(:, i+1)]; % 정답(타겟): 바로 다음 스텝
end
%% 3. Ridge regression을 통해 가중치 행렬 (W_out) 계산
feat_dim = size(O_train, 1);
W_out = (Y_target * O_train') * inv(O_train * O_train' + alpha * eye(feat_dim));
% Lorenz attractor prediction
Y_pred = zeros(dim, test_len);
% train data의 마지막 부분(초기값)을 가져옵니다.
current_history = train_data(:, train_len - warmup : train_len);
for t = 1:test_len
% 1. 현재 history buffer로 feature vector 생성
vec_linear = [];
for delay = 0:(k-1)
% history의 끝에서부터 과거로 가져옴
vec_linear = [vec_linear; current_history(:, end - delay*s)];
end
full_prod = vec_linear * vec_linear';
vec_nonlinear = full_prod(triu(true(size(full_prod))));
O_vec = [1; vec_linear; vec_nonlinear];
% 2. 다음 스텝 예측 (행렬 곱)
next_step = W_out * O_vec;
Y_pred(:, t) = next_step;
% 3. History 업데이트
% 가장 오래된 데이터 버리고, 방금 예측한 값을 끝에 추가 (Closed-loop)
current_history = [current_history(:, 2:end), next_step];
end
%% 시각화
figure('Position', [100, 100, 1000, 500]);
plot(test_data(1, :), 'k', 'LineWidth', 1.5); hold on;
plot(Y_pred(1, :), 'r--', 'LineWidth', 1.5);
title('Time Series Prediction (x-component)');
legend('Ground Truth', 'NG-RC Prediction');
xlabel('Time Steps'); ylabel('x'); grid on;'Research' 카테고리의 다른 글
| Reservoir computing - Hyperparameter optimization 실습 (MATLAB) (0) | 2026.01.31 |
|---|---|
| Bayesian Optimization에 대한 컨셉 이해 & MATLAB 실습 (0) | 2026.01.31 |
| Next Generation Reservoir Computing 읽기 (0) | 2026.01.25 |
| 레저버 옵저버 (Reservoir observer) 실습 (MATLAB) (0) | 2026.01.24 |
| 레저버 옵저버 (Reservoir observer) 논문 읽기 (1) | 2026.01.24 |
'Research' Related Articles
more



